Related Topics:
Opencv Optical Flow Algorithms-
The optical flow module cannot be connected to the board
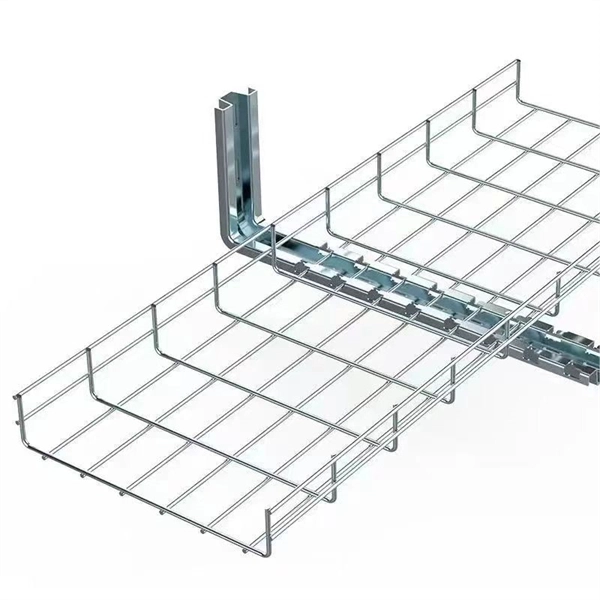
Unplug it, and connect it to your autopilot. In most cases an I2C splitter should be used to allow other I2C devices (like the external RGB LED and GPS/Compass module's compass) to share the same port. The PX4FLOW (Optical Flow) Sensor is a specialized high resolution downward pointing camera module and a 3-axis gyro that uses the ground texture and visible features to determine aircraft ground velocity. Although the sensor may be supplied with a built-in Maxbotix LZ-EZ4 sonar to measure height. The image below shows an optical flow setup with a separate flow sensor (PX4Flow) and distance sensor (Lidar-Lite): An Optical Flow setup requires a downward facing camera and a downward facing distance sensor (preferably a LiDAR). These can be combined in a single product, such as the ARK Flow. After running the "make px4_fmu-v5_default" command and flashing it onto the FC, the I/O indicator light rapidly blinks red, indicating an error. We are trying to run PX4 with an optical flow sensor with position control mode without GPS. Warning: Px4Flow is supported by drone firmware version 3. It has not received support on fixed-wing or unmanned vehicles.
[PDF Version]
-

Can the optical flow module work at night
Many successful optical flow estimation methods have been proposed, but they become invalid when tested in dark scenes because low-light scenarios are not considered when they are designed and current optical flow bench-mark datasets lack low-light samples. Optical Flow uses a downward facing camera and a downward facing distance sensor for velocity estimation. It can be used to determine speed when navigating without GNSS — in buildings, underground, or in any other GNSS-denied environment. The video below shows PX4 holding position using the Ark. This article describes how to setup the PX4FLOW (Optical Flow) Sensor which can be used for Non-GPS navigation. The PX4FLOW is not yet supported in Plane or Rover. The sensor has a native resolution of 752×480 pixels, a 4-fold grading and cropping algorithm is used to calculate the optical flow, the calculation speed reaches 250Hz (daytime, outdoor), and it has a very high sensitivity. The product page says: - The Maximum range of VL53L0X is 2m, Altitude hold 0~2m @ throttle 0~100% if VL53L0X is enabled.
[PDF Version]
-

Is it okay to not turn on the axial flow fan of the optical exchange box
Do not use the Box Fan with the Finger Guard removed. Make sure that power is turned OFF before performing any action that requires touching the blades, such as inspections or filter replacement. Imbalanced Blades Imbalanced blades are one of the leading issues affecting axial fans. Imbalance can lead to excessive. Supplementary comments on what to do or avoid doing to use the product safely. Meaning of Product Safety Symbols Used to prohibit touching certain portions of the device under specific conditions because of the possibility of. Axial flow fans, like the advanced Leapin ABF Series, belong to a category of fans that rotate and allow airflow throughout the parallel shaft axis of the device. This guide covers how axial fans work, what distinguishes tube axial from vane axial designs, the role. This article addresses prevalent issues related to axial fan motors and presents ten effective solutions to mitigate these challenges. It underscores the significance of regular maintenance, proper installation, and environmental protection strategies.
[PDF Version]
-
Single-mode single-fiber and dual-mode optical fiber
Single fiber modules (BiDi) use one fiber for both transmitting and receiving data. Whether you're designing a short-range data center network or a long-distance metro backbone, understanding the distinctions between single vs. This guide breaks down these two critical dimensions of optical transceiver design to help. There are different types of fiber optic cables because each type is optimized for specific applications that have unique requirements for bandwidth, transmission distance, and environmental factors. That makes picking between single mode and multimode fiber optic cables an. If you're just starting to learn about fiber optics, you might come across four common terms: single fiber vs dual fiber, single mode vs multimode fibre.
-

2001 Tunisia Optical Cable Construction
This is a list of projects in. While are used to connect countries and continents to the, are used to extend this connectivity to landlocked countries or to urban centers within a country that has submarine cable access. In most of the world, a large number of such cables exist, often amounting to robust.
-

On-site inspection of optical cables should test the optical fiber
During the on-site inspection of optical cables, the fiber attenuation constant and fiber length should be tested, and cracks and non-uniformity along the length should be carefully checked. An optical time domain reflectometer (OTDR) is generally used for inspection. To assure that the link will be correctly installed, Rosenberger supply the correct equipment for inspecting, cleaning and testing the fiber optic link. Simply connect the fiber optic connector to the microscope. Fiber Optic Testing Testing is used to evaluate the performance of fiber optic components, cable plants and systems. This testing will ensure that the data necessary to properly evaluate any future system malfunctions will be av nctioning. So, you drop everything and i vestigate. He's right – it is n t working.
[PDF Version]
-

OPM Optical Power Meter Usage
An optical power meter (OPM) is a device used to measure the power in an signal. The term usually refers to a device for testing average power in systems. Other general purpose light power measuring devices are usually called,, power meters (can be sensors or ), or lux meters. A typical optical power meter consists of a , measuring and display. The sens.
-

Two wires for the optical module
An optical module is a typically hot-pluggable optical transceiver used in high-bandwidth data communications applications. Optical modules typically have an electrical interface on the side that connects to the inside of the system and an optical interface on the side that connects to the outside world through a fiber optic cable. The form factor and electrical interface are often specified by an int. Electrical Interface TypesThere have been multiple variants of the electrical interface of optical modules that have been used over the years. The earliest forms of optical modules had an analog electrical interface. In the transmit dir. Many different forms of optical modulation and multiplexing have been employed in optical modules. The most common modulation technique historically has been or NRZ.
[PDF Version]